디지센서스 시대 이끄는 촉각 센싱 기술 2 - 촉각 디스플레이 기술 현황 및 응용 사례
[스마트 센서] 디지센서스 시대 이끄는 촉각 센싱 기술 1 - 촉감 센서가 중요한 이유
[스마트 센서] 디지센서스 시대 이끄는 촉각 센싱 기술 2 - 촉각 디스플레이 기술 현황 및 응용 사례
촉각 디스플레이 기술 현황 및 응용 사례
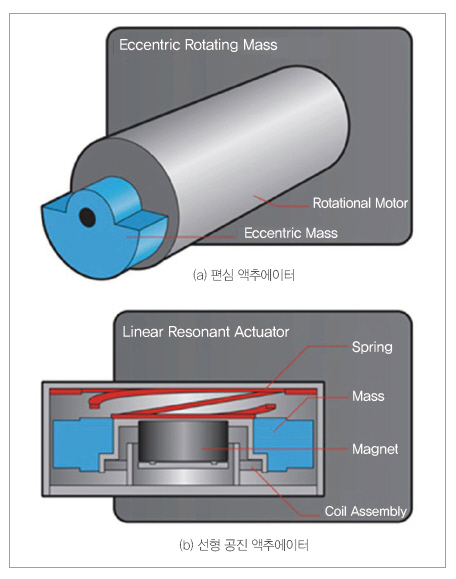
그림 2. 진동 액추에이터의 기본 구조
촉각 디스플레이 기술은 어떤 자극을 제공하느냐에 따라 크게 진동감과 표면 질감으로 나눌 수 있다. 그중 현재 상용화되어 가장 널리 활용되고 있는 기술은 진동감을 나타내는 기술이다. 진동감은 다른 감각에 비해 구현이 간단해 저렴하고 전력소모가 적으며, 소형화된 액추에이터를 활용할 수 있어 모바일 환경에 적합한 촉감이라고 볼 수 있다.
초기에는 편심 회전모터[그림 2(a)]를 이용해 나타냈으나 강한 진동을 생성할 수 있는 반면 응답속도가 200ms 정도로 느리고 진동의 진폭과 주파수를 독립적으로 제어할 수 없다는 단점이 있었기 때문에 선형공진 액추에이터(Linear Resonant Actuator)로 교체됐다[그림 2(b)].
이 액추에이터는 기계적 마찰을 줄여 응답속도가 30ms 이하로 우수하고 강한 진동을 생성할 수 있으며 주파수에 따라 진동 크기(진동량)를 제어할 수 있다. 공진주파수는 피부의 파치니언 소체가 민감하게 반응하는 영역인 200∼300Hz 안에 위치하도록 설정한다.
현재 모바일 기기에서 사용되고 있는 진동모터는 거의 대부분 선형공진 액추에이터다. 하지만 역시 이 액추에이터도 공진주파수 근처에서만 진동출력이 있어 다양한 진동감을 전달하기 어렵다.
따라서 대역폭을 넓히기 위해 전자기력 코일 기반의 진동소자가 아닌, 압전(Piezoelectric) 세라믹 액추에이터가 개발되었다(그림 3).
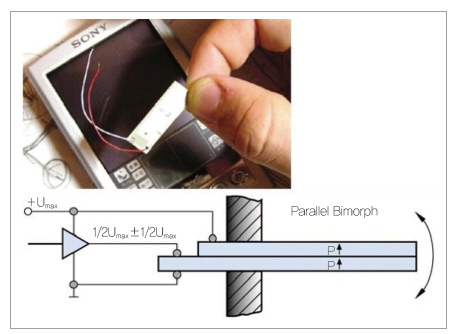
그림 3. 압전 물질과 바이모프를 이용한 압전 액추에이터
압전 액추에이터는 신호의 주파수, 크기에 따라 진동 주파수와 크기를 자유자재로 조절할 수 있으므로 세밀한 진동감을 구현할 수 있으며 응답속도도 매우 빠르다. 이러한 장점으로 인해 많은 제조사(Blackberry Storm Ⅱ, RIM corp, APE 등)에서 고선명(High Definition, HD) 햅틱스를 구현하기 위해 개발했다.
필자가 직접 체험해볼 기회가 있어, 압전 액추에이터를 장착한 스마트폰 시제품으로 게임을 해봤는데 기존 진동 액추에이터에서는 느낄 수 없었던 세밀한 진동감이 전해져 왔다.
이와 같은 장점에도 불구하고 아직 세라믹 액추에이터가 장착된 스마트폰이 대중화되지 못했는데, 그 이유는 세라믹 재료의 특성상 부러지기 쉬워 충격이 가해지면 제 기능을 못하는 경우가 많기 때문에 강도 높은 모바일 기기의 내구성 시험을 통과하지 못했기 때문이다.
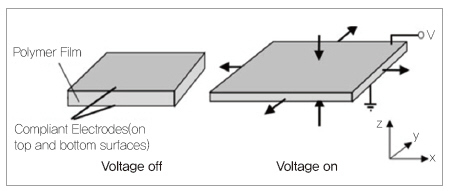
그림 4. 전기 활성 폴리머를 이용한 액추에이터의 원리
이 밖에도 진동 자체의 크기가 코일 기반 액추에이터보다 작아, 메시지 수신 알림과 같이 모바일 기기를 전체적으로 진동시키려면 별도의 선형공진 액추에이터가 필요하다는 단점도 있다.
부러지지 않으면서도 기존 세라믹 기반 압전 소재만큼 진동량을 발생시킬 수 있는 폴리머 기반의 압전 재료가 개발된다면 모바일 및 웨어러블 제품에서 유용하게 사용될 것이다.
전기활성 폴리머(Electroactive Polymer, EAP)는 높은 유전율(High Dielectric Constant, high-k)을 갖고 있어 고전압을 견딜 수 있는 폴리머로, 그림 4와 같이 폴리머 양면에 전극을 형성하며 전압을 가해주면 정전기력에 의해 폴리머가 압축되면서 힘을 발생시킨다.
기본 재료가 폴리머이므로 유연하게 액추에이터를 제작할 수 있어 압전 액추에이터가 가진 단점을 보완할 수 있고, 이것 역시 진동 크기와 주파수를 독립적으로 제어할 수 있다는 장점을 갖고 있다. 하지만 높은 구동 전압(1kV∼3kV)이 필요하고 상대적으로 발생 힘이 작다는 단점도 있다. 그림 5와 같이 EAP를 이용한 액추에이터는 실감 게임용 아이폰 외장케이스와 햅틱 헤드폰에 상용화됐다.

그림 5. EAP를 이용한 햅틱 엑추에이터 상용화 사례
표면 질감을 나타내는 방법은 정전기력, 압축 공기, 핀 배열, 초음파 등이 있는데 모바일 기기에 적합한 정전기력 방식이 가장 많이 연구되고 있다. 정전기력 방식은 기계적 진동을 이용하는 것이 아니라 서로 다른 전하 사이에 작용하는 쿨롱 힘(Coulomb’s Force)이 작용하는 원리를 이용한 것이다.
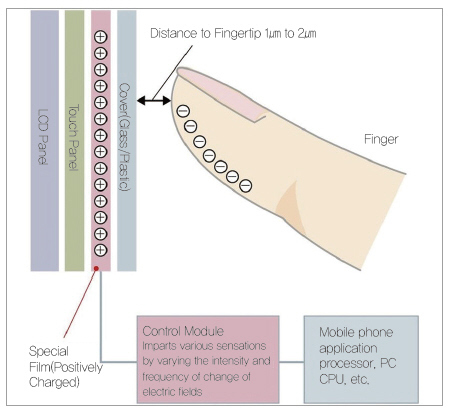
그림 6. 정전기력을 이용한 촉감 제시 원리
그림 6과 같이 터치 패널 위에 양전하로 충전된 필름을 놓고 보호층(유리 또는 플라스틱 필름)으로 덮은 다음, 음전하로 충전된 손가락으로 보호층을 접촉하면 사람의 피부와 양전하로 충전된 필름 사이에 인력이 작용한다. 전류를 펄스 형태로 가해주면서 손가락을 문지르면 질감이 느껴진다.
이 방식은 기계적으로 움직이는 부분이 없기 때문에 내구성이 뛰어나고 전력소모가 적으며 필름 형태로 매우 얇게 제작할 수 있을 뿐만 아니라 투명 전극을 사용할 경우 투명하게 만들 수 있어 스마트폰, 태블릿 PC와 같은 모바일 기기에 적용하기에 유리하다. 핀란드 벤처기업인 센세그(Senseg), 미국의 디즈니에서 상용화를 진행하고 있다.
이 방식의 단점이라면 정전기력을 이용하므로 고전압이 필요하며, 손가락을 움직일 때만 느낌이 전달된다는 것이다. 이는 사람이 미세한 변화는 잘 감지하지만, 변화가 없는 일정한 힘에 대해서는 금방 적응하여 느낄 수 없기 때문이다. 마치 개미 한 마리가 손가락 위를 기어 다니면 느낄 수 있지만, 손가락 위에서 움직이지 않고 가만히 있으면 처음 놓였을 때만 인지하고 그 이후에는 아무런 힘도 느낄 수 없는 것과 같은 이치이다. 따라서 가상 키보드를 이용할 경우, 키보드를 누를 때 햅틱 피드백을 제공할 수 없게 된다.
또 하나의 단점으로는 양손이 기기에 접촉이 되어야 한다는 것이다. 사람의 손가락이 음전하로 충전되어야 하므로 한 손은 스크린을 터치하면서 다른 한 손은 기기의 케이스에 접촉되어 사용자의 몸이 전기적으로 그라운드되어 있어야 잘 느껴진다. 이 밖에도 고전압 사용(100V∼1kV), 손가락 상태(습기 등), 스크린 오염 정도, 개인에 따라 전해지는 촉감의 편차가 있는 것도 단점이라고 할 수 있다.
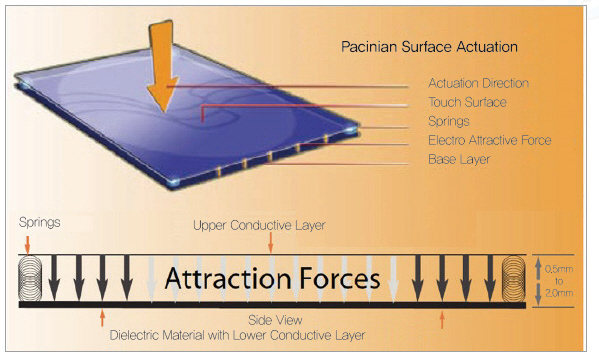
그림 7. Pacinian사의 표면 제시 액추에이터 구조
이와 같은 단점을 보완하기 위해 Pacinian사는 그림 7과 같이 양쪽에 0.5mm∼2.0mm 간격으로 도전층을 두고 전압을 가해 발생하는 정전기력(인력)을 사용한다. 양 도전층 사이에는 스프링이 있어 상부 도전층을 지지하고 복원력을 제공하며, 하부 도전층 위에는 고유전체막이 있어 더 큰 힘을 낼 수 있도록 설계했다.
이 방식의 장점은 사람의 피부를 도전체로 이용하는 것이 아니므로 사람에 따른 편차가 없으며 넓은 스크린 전체 면적을 도전판으로 사용하므로 정전용량이 크다. 따라서 적은 전압(5V)으로 약 200g의 힘을 낼 수 있고 DC 출력이 가능하여 화면 위의 키패드를 누를 때 햅틱 감을 제공할 수 있다.
단점이라면 두 도전층 사이에 공기 층과 유전체 막이 존재하여 광학적으로 선명도가 떨어지며 위의 도전층이 스프링에 의해 지지되어 있기 때문에 기계적인 내구성이 떨어진다는 것이다.
앞서 언급한 방식과는 전혀 다른 방식의 접근법도 존재한다. 2009년 택터스 테크놀로지(Tactus Technology)사는 유체펌프를 사용, 키패드가 생성될 터치스크린 지점이 볼록 나오도록 제작하여 마치 키보드를 누르는 것과 같은 촉감을 느낄 수 있도록 했다. 신선한 방식이기는 했지만 패널 자체의 두께가 커지며 유체 펌프를 사용함으로써 여러 가지 제약(부피, 전력소모, 유체 밀봉, 광학적 선명도)을 안고 있어 현재 대중화되지는 않고 있다.
촉각 센싱 기술로 더 편하게, 더 안전하게
모바일 기기의 입력 방식이 키패드에서 터치스크린 방식으로 급격하게 바뀌면서 잃어버렸던 촉감을 되찾기 위한 노력은 꾸준히 계속될 것으로 생각된다. 예전에는 직접 눈으로 보지 않고 촉감만으로 메시지를 오류 없이 보낼 수 있었다. 그리고 눈으로 보고 입력하더라도 오타가 날 확률이 적었다.
키패드 방식의 휴대폰을 사용했던 독자라면 누구든지 공감할 것이다. 필자는 요즘 스마트폰을 사용하면서 무수히 많은 오타를 내고 있다. 만약 오타를 내지 않으려면 엄청나게 집중해야 한다. 하지만 촉감의 도움을 받으면 그만큼 노력을 들이지 않아도 기기 동작이나 주변 상황 인식에서 오류가 날 확률이 줄어든다. 이러한 이유로 촉감을 이용한 디바이스는 꾸준히 발전할 것으로 예상된다.
지금까지의 기술 추이를 살펴봤을 때, 모바일 기기에서는 당분간 여러 가지 현실적 제약 때문에 진동감을 이용한 햅틱 자극이 주를 이룰 것이며, 모바일의 개념을 자동차까지 확대시킬 경우 향후 햅틱 기술이 가장 많이 적용될 분야는 자동차 산업이 될 것이다. 자동차의 경우, 기존 스마트폰에 있는 제약(즉 전력소모, 소형화 문제 등)이 상당 부분 해결되기 때문이다.
자동차가 지능화되면서 운전자와 소통을 위해 다중 감각이 활용되는 것은 필수적이다. 가령, 운전자가 졸면서 운전할 경우 이를 인지한 자동차가 운전자에게 음성뿐만 아니라 시트에 장착된 햅틱 액추에이터로 차선 이탈에 대해 경고하면 상황 인지에 훨씬 더 도움이 될 것이다.
참고문헌
1. I. Poupyrev, S. Maruyama, and J. Rekimoto, “TouchEngine: A Tactile Display for Handheld Devices”, Computer Human Interaction 2002, pp. 644-645, 2002
2. Jeremy A. Fishel and Gerald E. Loeb, 2012, “Bayesian exploration for intelligent identification of textures,” frontiers in Neurorobotics, Vol. 6, No. 4, pp. 1 - 20.
3. Peter Crocker, and Matt Lewis, “Next Generation Haptics: Market Analysis and Forecasts,” ARCchart, Feb. 2011
4. Hyun, J., Hwang, J., Ryu J., & Cho, K. (2011). Effect of Spatial Haptic Cues on Visual Attention in Driving. Automative UI 2011. Salzburg, Austria.
5. Ilya Resenberg and Ken Perlin, The UnmousePad- An Interpolating Multi-Touch Force-Sensing Input Pad, ACM Transactions on Graphics, Vol. 28, No. 3, Article 65, 2009
6. Thorsten A. Kern. 2009. Engineering Haptic Devices. Berlin Heidelberg: Springer
7. 이정모 (2012). 체화된 인지(Embodied Cognition)접근과 학문간 융합 - 인지과학 새 패러다임과 철학의 연결이 주는 시사. Journal of Philosophical Ideas, 제 38 호, 27-66.
김민석 책임연구원 한국표준과학연구원
'IT 융합기술과 관련정보' 카테고리의 다른 글
| 신의 계산법, 양자의 전성시대가 온다 (2) | 2022.02.06 |
|---|---|
| 말 많은 양자컴퓨터, 오해와 사실 (2) | 2022.02.05 |
| 운영체제(OS)와 함께 발전해 온 디스플레이 (0) | 2022.02.05 |
| 자율주행 자동차를 완성하는 핵심기술들 (2) | 2022.02.04 |
| 북핵 EMP 공격도 막는다…미래 전쟁의 첨단 과학기술들 (2) | 2022.02.04 |
| 차량용 디스플레이 (9) | 2022.02.03 |
| 10년 후, 당신을 먹여 살릴 10대 미래 혁신기술은? (4) | 2022.02.03 |
| 언팩 D-7 '갤럭시S22' 스펙 총정리 (0) | 2022.02.02 |



