728x90
반응형
자율주행을 위한 라이다(Lidar) 센서
목차
자율주행 요소 기술
- 최근들어 라이다를 사용해야 하는 지에 대한 유무가 논쟁이 되고 있고 테슬라는 라이다는 물론 레이더도 사용하지 않으려고 하고 있습니다. 전 세계적으로 이런 논쟁이 있지만 라이다 센서 자체의 특성이 있기 때문에 이 글에서 한번 살펴보도록 하겠습니다.
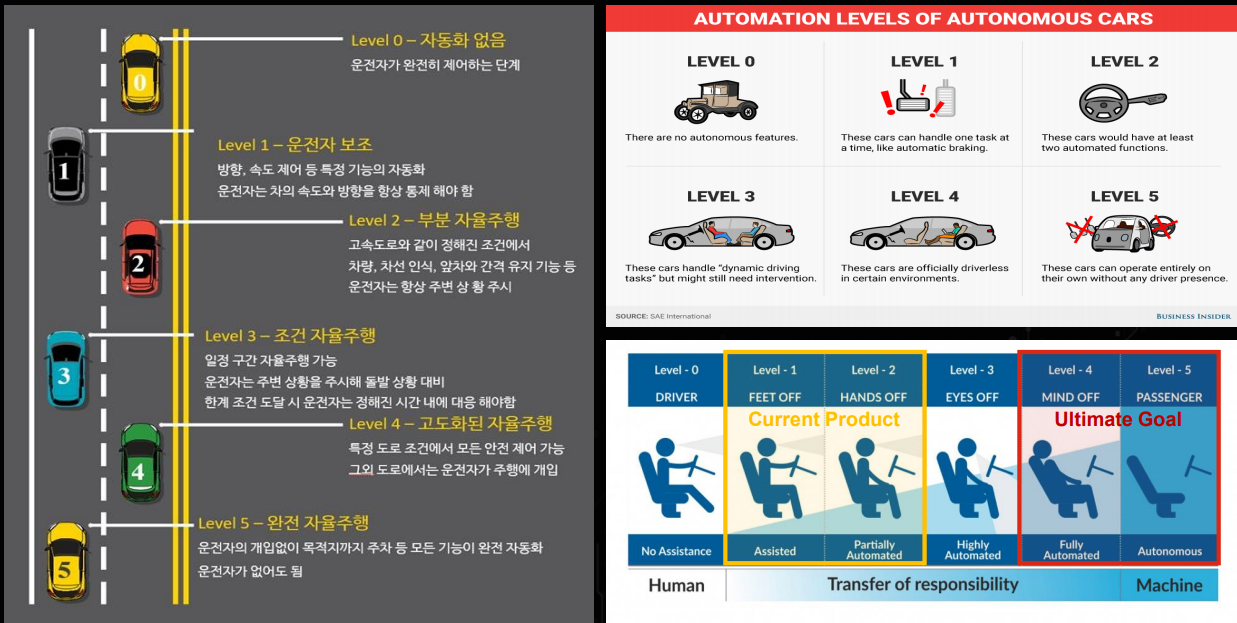
- 위 표는 이제 많은 사람들이 알고 계시는 자율주행의 6단계를 나타냅니다. 이번 글에서 다룰 라이다는 레벨 2단계 이상에서의 자율주행을 구현하기 위하여 사용되고 있습니다. 일반적으로 라이다를 사용하여 자율주행을 구현할 때, 현재 수준으로는 레벨 3의 양산차 판매 또는 레벨4의 로보택시 서비스를 판매하는 것을 목표로 하고 있습니다.
- 자율주행을 구현하기 위하여 센서를 통한 감지, 주변 객체 인지, 위치 추정, 경로 계획 및 제어 등이 필요합니다.
- 이 기능들을 구현하기 위하여 가장 기본이 되는 센서를 통한 감지가 매우 중요하기 떄문에 다양한 센서들이 사용됩니다.
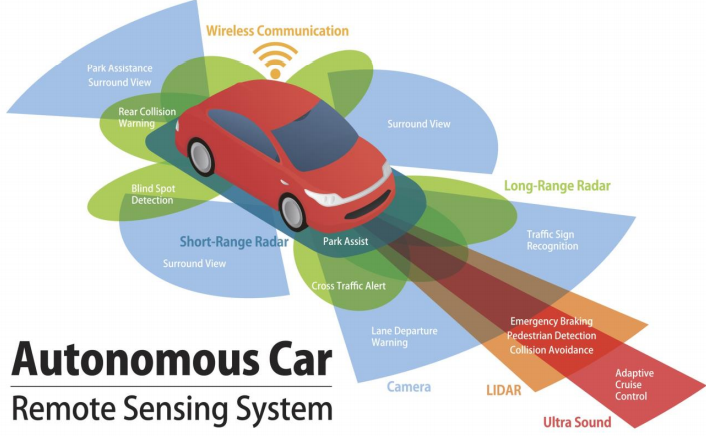
- 위 그림과 같이 자율주행을 구현하기 위하여 다양한 센서를 사용하고 있습니다. 센서들마다 특성이 있기 때문에 서로 다른 센서가 보완해 주고 있습니다. (현 시점으로 테슬라는 카메라, 초음파 센서만 사용하고 있긴 하지만…)
- 대표적으로 GPS, IMU, 카메라, 레이더 등이 있고 자율주행에서 사용하는 HD Map 그리고 이 글에서 다룰 라이다가 있습니다. 먼저 라이다를 써야하는 이유를 살펴보기 전에 다른 센서의 특성을 간략하게 살펴보고 라이다가 가지는 장점을 다루어 보겠습니다.
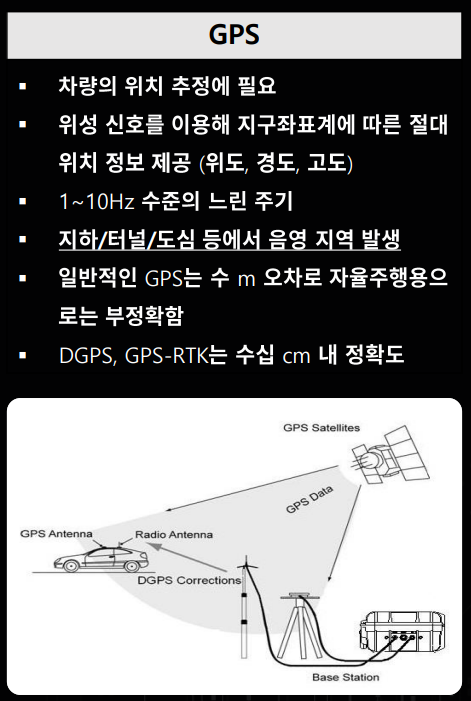
- 먼저 GPS (Global Positioning System) 센서는 차량의 위치를 추정하는 데 사용되는 센서입니다. 위성으로 부터 신호를 받아서 차량의 절대적인 좌표를 얻게 되는데 문제는 현재 제공되는 GPS의 오차 수준이 미터 단위 정도의 정확도 밖에 제공하고 있지 못하기 때문에 자율 주행에 필요한 수십 cm 단위의 정확도를 달성하기 위해서는 주변에 있는 통신 인프라와 함께 통신하는 DGPS나 GPS-RTK와 같은 기술들이 필요합니다.
- 또한 GPS는 고층 빌딩이 둘러 쌓여있거나 지하 터널에서는 순간적으로 신호를 받지 못하는 경우가 발생할 수 있습니다. 모든 판단을 센서를 통하여 하는 자율 주행 시스템의 경우 순간적인 신호 끊김도 위험하기 때문에 GPS 만으로는 위치 추정이 어렵습니다.
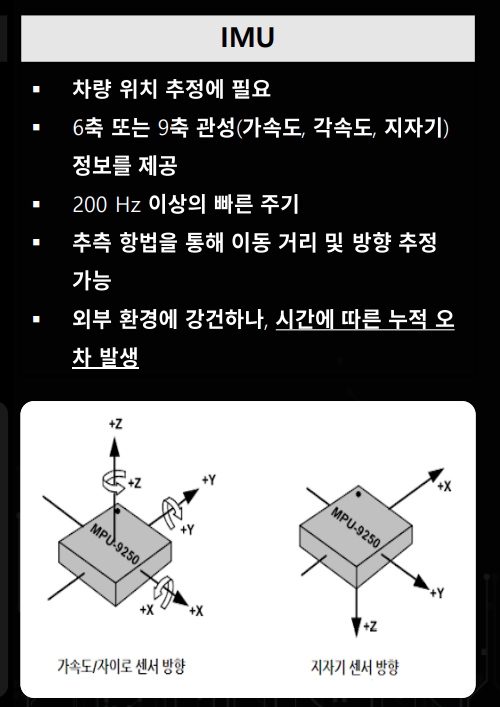
- 그래서 함꼐 사용되는 센서가 IMU (Inertial Measurement Unit) 입니다. IMU는 순간순간 자동차의 속도, 가속도 및 이동 방향을 관성 정보를 이용하여 측정하는 센서입니다. 따라서 순간적인 차량의 이동 정보를 GPS와 함께 이용하여 차량의 위치를 추적하는데 사용됩니다.
- IMU 센서는 순간 순간 위치를 파악할 수 있으나 매 순간 위치에 센서의 오차가 있을 수 있고 이 오차가 계속 누적이 되면 차이가 발생할 수 있으므로 최근에는 카메라, 레이더, 라이다 등이 같이 사용되게 됩니다.
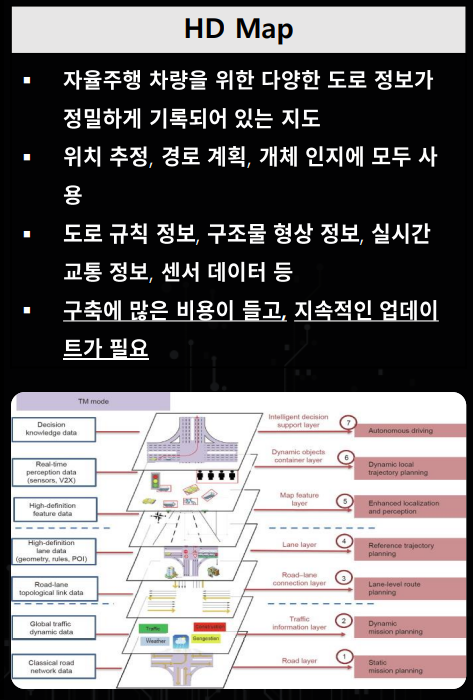
- HD (High-definition) map이란 단순히 내비게이션에 사용되는 지도 정보 뿐 아니라 자율 주행 차량이 이동하는 도로 환경 정보 (차선, 가드레일 등)를 알수 있으므로 위치를 판단할 때 사용할 수 있습니다.
- 하지만 HD map을 구축하는 데 굉장히 많은 비용이 들고 한번 구축했다고 하더라도 지속적인 업데이트가 필요하기 때문에 모든 지역의 HD map을 구축하는 데 한계가 있습니다.
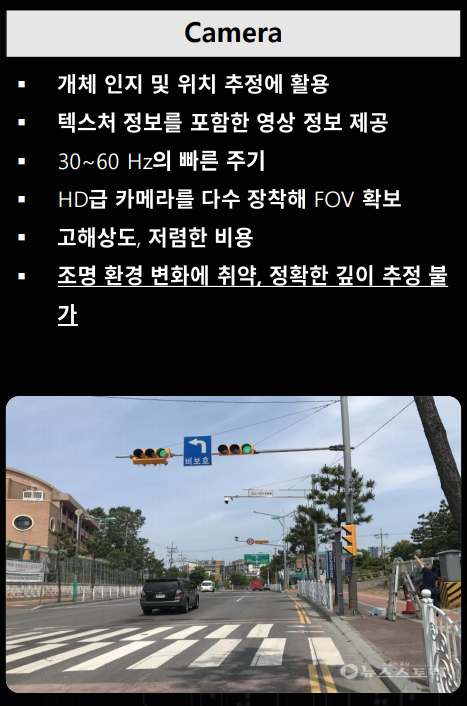
- 자율 주행 자동차 및 ADAS에서 가장 많이 사용되는 카메라 같은 경우 풍부한 텍스쳐 정보를 담고 있는 영상 정보를 얻을 수 있습니다.
- 카메라 센서의 한계점으로 지적되는 주변 환경에 취약하다는 단점이 있어서 최근에는 레이더나 라이다와 함께 사용되고 있습니다.
- 최근에 딥러닝 기술의 발달로 더욱 높은 정확도로 자율 주행에 필요한 정보를 카메라를 통해 얻고 있는 추세입니다.
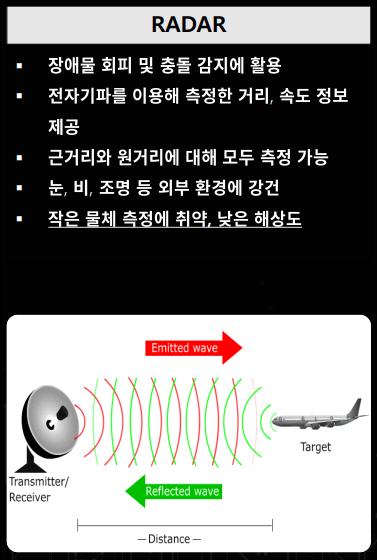
- 카메라와 달리 레이더, RADAR(Radio Detection and Ranging)는 전자파를 이용하여 거리나 속도 정보를 자율 주행 자동차에 제공합니다. 레이더 같은 경우 원거리 물체를 측정하는 데 용이하고 특히 눈, 비, 조명과 같은 주변 환경에 굉장히 강건하여 악조건 환경에 자율 주행 시스템의 판단을 돕는데 사용되고 있습니다.
- 하지만 레이더의 경우 아직 까지 해상도가 낮기 때문에 레이더 센서의 값만을 가지고 감지된 물체가 차량인지 사람인 지 판단하는 데에는 한계가 있습니다. 현재 수준으로는 물체의 구분보다는 물체의 유무 판단에 적합합니다.

- 위 그림은 레이더를 통하여 도로 위의 물체를 파악하여 위치를 표시한 예시입니다.
- 지금 까지 라이다 센서를 제외한 자율 주행에 많이 사용되는 센서들의 특성에 대하여 간략하게 알아보았습니다.
라이다 센서
- 그러면 이 글의 주제인 라이다에 대하여 알아보도록 하겠습니다.
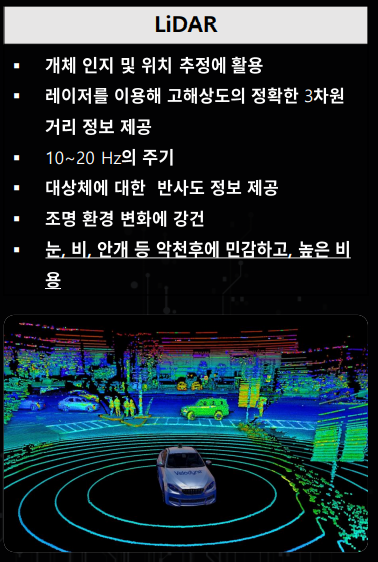
- 라이다, LIDAR(Light Detection and Rangin)는 빛 즉 레이저를 이용하여 고해상도의 3차원 정보를 제공하는 센서입니다.
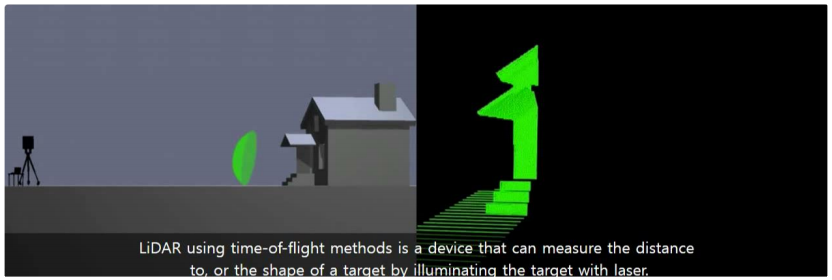
- 위 그림과 같이 라이다는 레이저를 송출하고 레이저가 물체에 맞고 반사되어 돌아오는 시간을 계산하여 빛의 이동 시간을 계산하고 이를 통해 주변 환경에 대한 3차원 형상을 측정합니다.
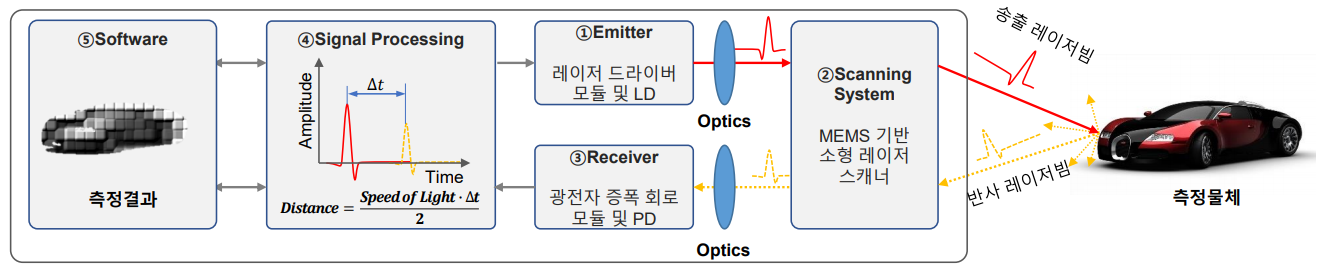
- 좀 더 상세하게 알아보면 라이다의 프로세는 위 그림과 같습니다.
- ① Emitter : 레이저를 송출하는 역할을 합니다.
- ② Scanning System : 송출한 레이저를 주변 환경에 맞게 조사하는 역할을 합니다.
- ③ Receiver : 반사되어 들어오는 빛을 다시 측정하는 역할을 합니다.
- ④ Signal Processing : Emitter ~ Receiver 까지 걸린 시간을 이용하여 각 포인트 마다의 거리를 계산하는 역할을 합니다.
- ⑤ Software : Signal Processing을 통해 얻은 각 Point 정보를 이용하여 주변 물체에 대한 측정 결과를 제공합니다.
- 라이다의 특성 상 카메라에 비해서 눈, 비, 안개, 조명과 같은 주변 환경 등에 강건하기도 하고 레이더에 비해서 고해상도의 3차원 형상 정보를 제공하고 있어서 레이더, 카메라와 함꼐 주변 환경을 감지할 수 있습니다.

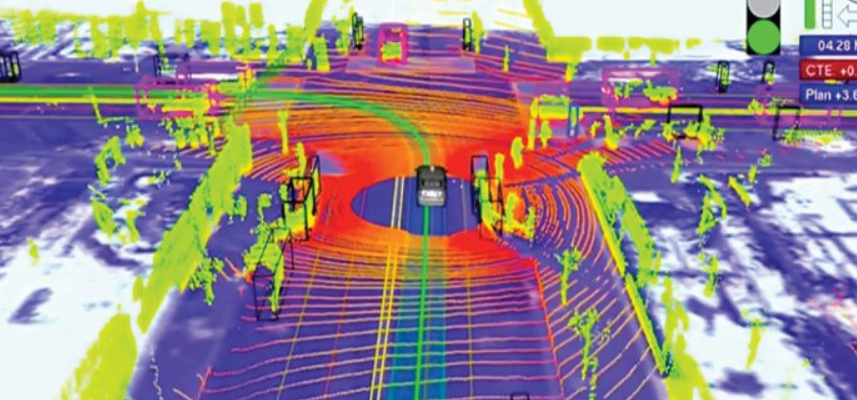
- 라이다를 이용하면 위 그림과 같이 주변 환경의 3D 정보를 수많은 점들의 뭉치인 point cloud 형태로 나타낼 수 있습니다.
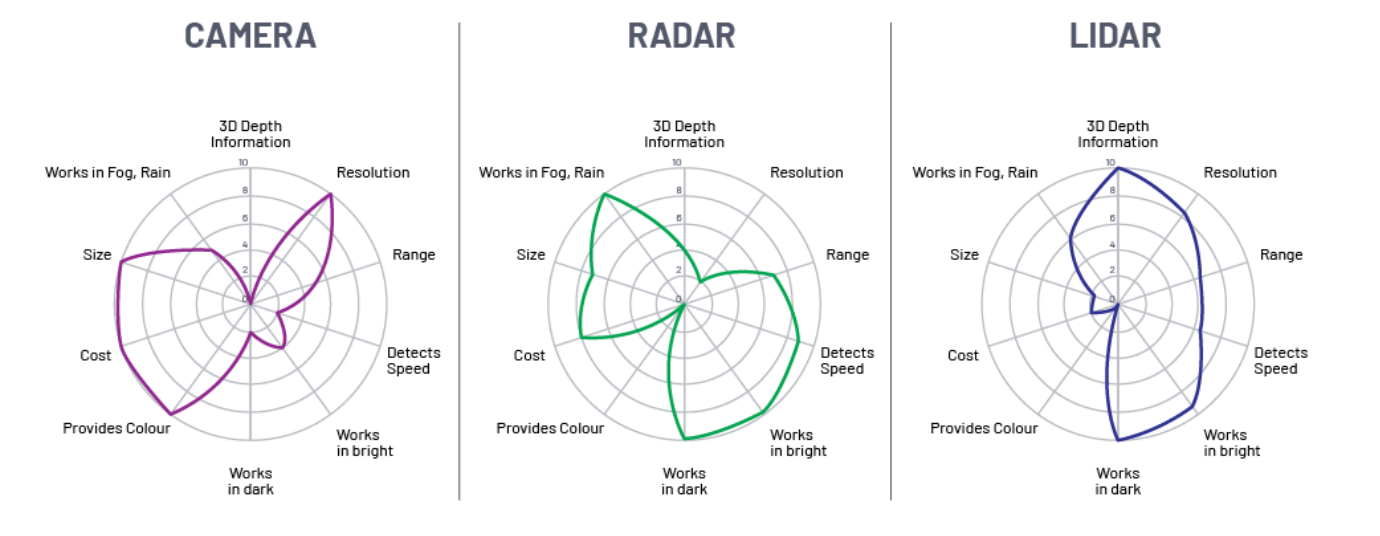
- 지금까지 알아본 센서 중에 흔히 가장 많이 사용되고 다루어지는 센서는 카메라, 레이더, 라이다 센서입니다.
- 위 표와 같이 각 센서는 장단점의 영역이 다르게 분포되어 있음을 알 수 있습니다. 즉, 단일 센서로는 모든 영역을 다 커버할 수 없습니다. 따라서 다양한 센서의 센서 퓨전을 통하여 서로의 장단점을 보완하는 것이 추세입니다.
- 특히 정교한 3D 데이터를 측정하기 위해서는 라이다가 독보적인 것을 알 수 있습니다.
라이다의 활용 : 위치 추정, 객체 인지
728x90
'자율주행차' 카테고리의 다른 글
| 자동차에 멀티 기가 이더넷이 필요한 이유 (3) | 2022.04.02 |
|---|---|
| 자율주행차 (12) | 2022.03.30 |
| 드디어 미국에 등장한 자율주행택시 (16) | 2022.03.27 |
| 테슬라 자율주행차 (5) | 2022.03.26 |
| 자율주행 앞당기는 차세대 기술 (15) | 2022.03.21 |
| 운전대 없는 자율주행차 생산 승인 (8) | 2022.03.13 |
| 구글, 자율주행에서 물체 감지 기술 공개 (8) | 2022.03.13 |
| 자율주행차를 위한 '히든 와이어링 배터리 내장형 시트' (4) | 2022.03.10 |